Hope it can still be useful!
haptic map
helping visually impaired navigate the streets

Context
This project took place in the context of the CHI Student Design Competition 2016. The subject of “doing good” had to be addressed by using Interaction Design Method for Assistive technologies.
Our take on the subject was to design the driverless car experience for visually impaired users. Our solution was an haptic map designed first to help the visually impaired users independently reach the driverless car from their starting point, this solution can however be extended to navigation in general.
Team: Rafael Goldenberg, Mohit Yadav & Clément Hamon
Problem
Driverless cars functioning in a Mobility As A Service (MAAS) way provides a huge opportunity to give the visually impaired more autonomy in their transportation; instantly accessible and more flexible than the public transportation.
We started our exploration of the problem by a body storming exercise to let ourselves imagine what the flow of such a service could be for visually impaired users. We also completed this exercise by conducting two interviews with visually impaired persons, as well as secondhand research.
One of the main insight we took from those research was that the experience extended further than just in the car and that issues such as getting to the car itself were also problematic.
We deepened our research by visiting a centre for visually impaired in the outskirt of Stockholm and learned from the way the environment was designed. Two personas were created, based on collected data, to guide our design.
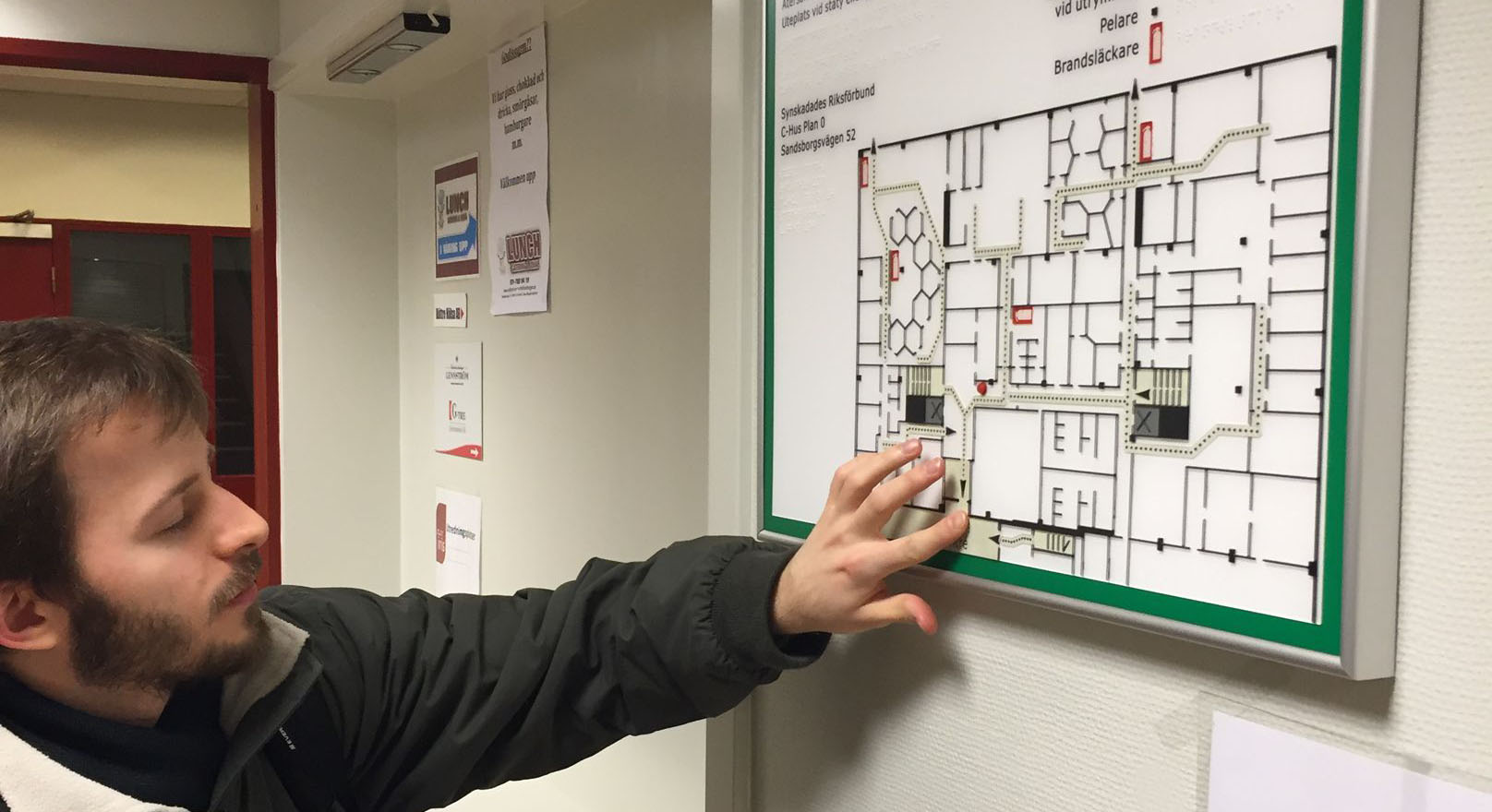
Learning from the evacuation assembly plan
After our research phase, we decided to focus our design on the issue of getting from your door into the car rather than the in-car experience itself. We felt that this was a less addressed problem: getting to a close but unknown space on your own when you are visually impaired.
Design
Haptic map is a tangible map designed to guide visually impaired users. The map is located on the back cover of a smartphone, with which it is linked.
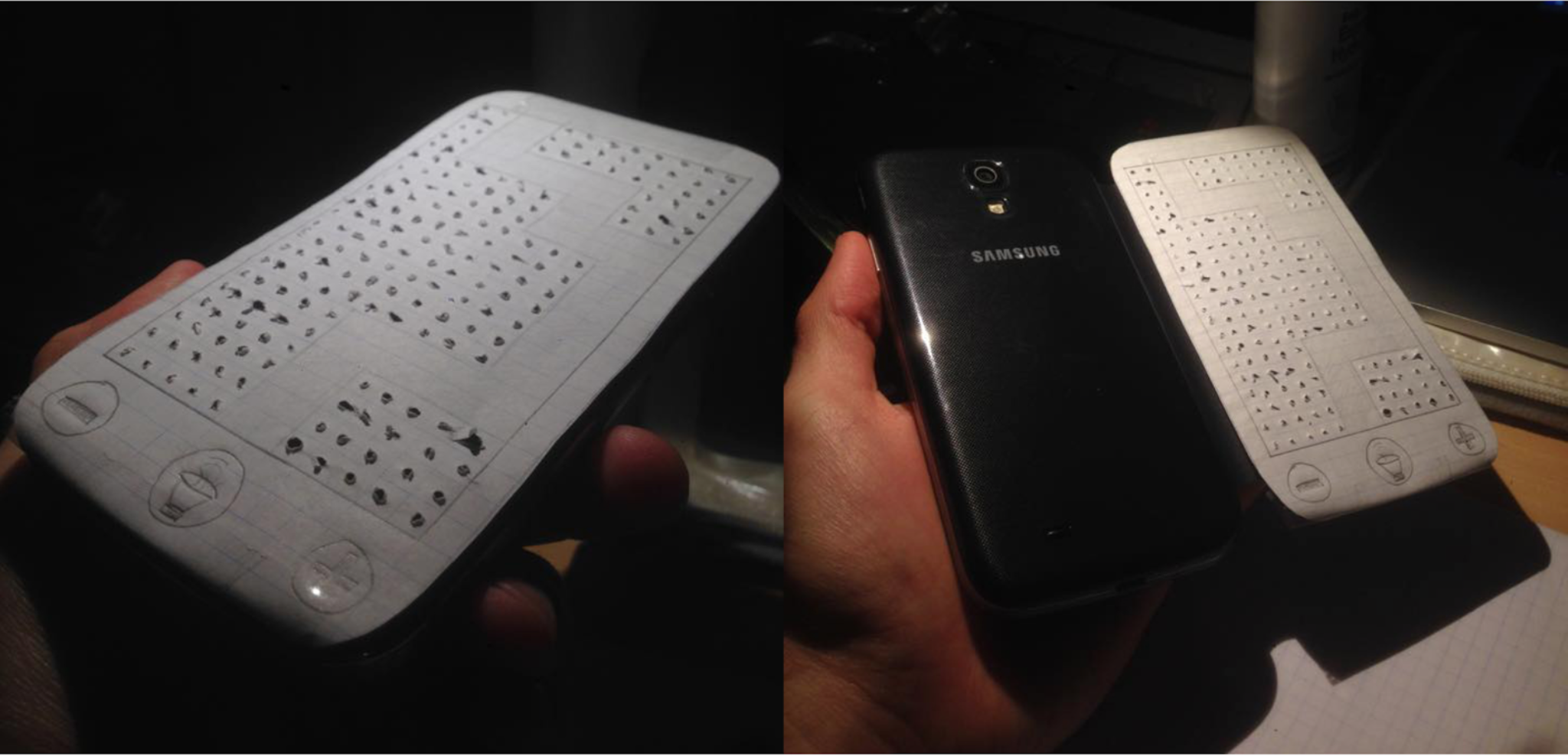
First prototype (Made by Rafael)
The inspiration for this design came from the tactile evacuation assembly plan that we encountered during our field trip, as well as project such as inFORM by MIT. We choose to not really on sound because listening to the surroundings is essential in visually impaired pedestrian's navigation. Our design also relies on tactile cues but do not make use of braille as less than 10% of the blind population in the US can actually read braille.
The map is giving feedback on the route to follow and the surroundings using a system of dotted points popping in and out.In order to test this idea we created a physical prototype and conducted some first evaluation.

Second protoype iteration

Third prototype iteration
Evaluation
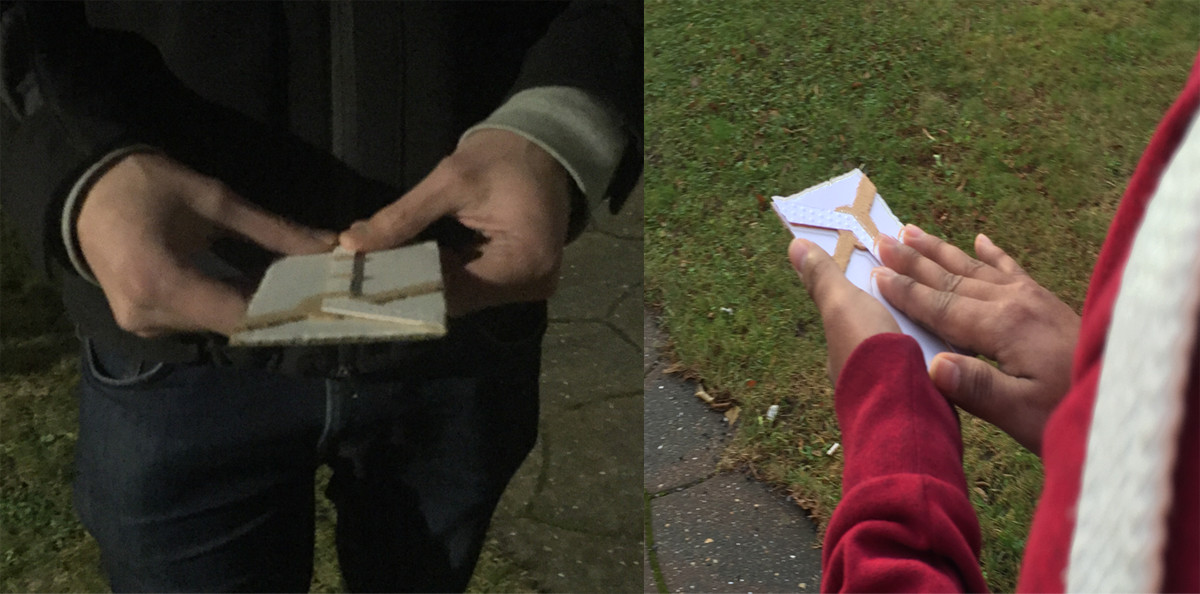
In order to conduct our first round of evaluation we recreated the map of a predefined path and asked 3 users in simulated blindness condition to try to follow that map. The use of simulated blindness was made for convenience and surely limits this evaluation.
This first round allowed us to still discover some issues such as the evaluation of distance or the difference between terrain that isn’t part of the recommended path but still walkable and dangerous or unwalkable terrain (roads, buildings…)
In-situ evaluation
During our last evaluation we got the chance to present our prototype to a visually impaired worker at SRF Stockholm, the city most important visually impaired association. He validated that the general navigation was clear but gave us some insights such as that the width of the road was unclear and that for users relying on the help of a cane, a handheld device might be challenging.

Expert evaluation with a visually impaired user
Conclusion
From this project I’ll remember the importance of user involvement, and the struggle that can go along with it. Being in Sweden, not speaking Swedish and having no few contacts made it hard to reach a real member of our target group but the insights we gathered there were of the uttermost importance.
Another core lesson was to not be afraid of letting our first idea go, like the in-car experience, if we find that we can bring more value somewhere else.

